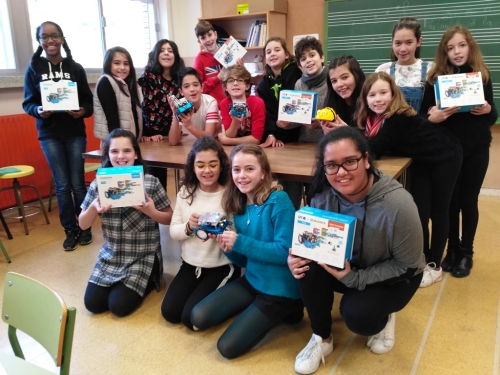
1º Comezamos desembalando as pezas e identificamos os elementos que o compoñen:
1º Comezamos desembalando as pezas e identificamos os elementos que o compoñen:
- Unha placa base chamada MCore con conectores e portos, leds, sensores, un zumbador, interruptor, etc, que é o cerebro do robot.
- Un chasis
- 2 Motores
- 2 Rodas con cadanseus zapatiños
- 1 Mini roda auxiliar
- Un sensor segue liñas e un de ultra sons
- 1 Módulo Bluetooth
- Batería de litio e caixa porta baterías
- Cables
- Parafusos, porcas e 1 desaparafusador.
2º Montamos os motores, para iso precisamos 4 parafusos longos e as porcas.
Mentres, poñémoslle os zapatiños ás rodas.
Cando estean os motores aparafusados, colocamos as rodas con parafusos autoperforantes M2x9
3º Xiramos o chasis e na parte frontal colocamos o sensor seguidor de liña e a mini roda auxiliar centrado nos buratos do medio. Empregamos 2 parafusos M4X8, cambiamos o desaparafusador ao modo Allen
4º De seguido aparafusaos o sensor de ultrason na parte dianteira con 2 parafusos de cabeza allen m4x8

5º Colocamos os cables nos conectores e sacamos os cables polo oco do chasis á espera de montar a placa.
6º Collemos a MCore, abrímola e colocamos con moito coidadiño o módulo Bluetooth. Ollo ao encaixar os pins! Volvemos a encaixar a cuberta.
7º Agora introducimos a batería de litio no soporte, sacando o cable pola fendedura lateral da caixiña e volvemos a pechala.
8º Encaixámola na parte inferior da placa.
9º Aparafusamos a MCore ao chasis, cos 4 parafusos M4x8
10º E por último conectamos os cables e xa estaría montado o robot:
- Conectar motores e batería.
- Conectar o sensor de Ultrasons ao porto 3
- Conectar o segueliñas no porto 2
- Conectar a matriz LEDs no porto 1
Agora só temos que probalo ;-)