Neste capítulo:
- HARDWARE: Sensor Segueliñas
- SOFTWARE: O Segueliñas no mBlock"
- Actividades:
-
- Branco ou Negro?
- Ségueme!
- Non saias!
- Loita Sumo
HARDWARE: Sensor Segueliñas
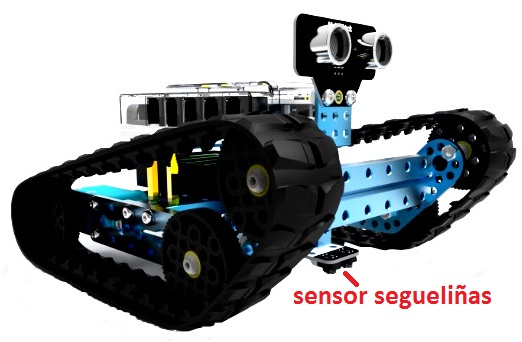
O Sensor Segueliñas, tal e coma o seu nome indica, é capaz de seguir liñas brancas sobre fondo negro ou ao revés, liñas negras sobre fondo branco.
O sensor distingue se está enriba unha superficie clara ou polo contrario sobre unha superficie escura. Debe situarse a unha distancia entre 1-2 cm do chan para que o poida detectar ben.
É un sensor externo, non está inserido na placa, tal e como se observa nas fotografías.
 |
 |
Vai conectado á placa a través das conexións RJ25 na tira de catro cores:

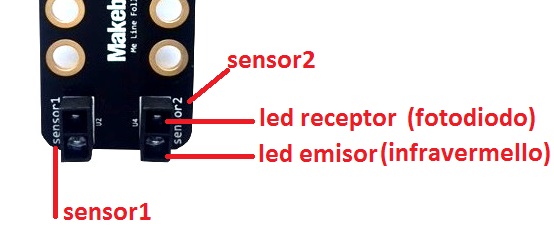
Cada sensor está composto por dous elementos:
|
- UN EMISOR: Será un LED que emite luz infravermella.
- UN RECEPTOR: Un LED que a recibe a luz infravermella. Un fotodiodo |
 |
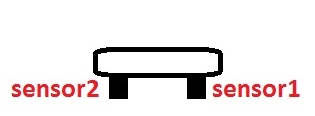
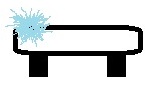
- Se o sensor se atopa sobre unha superficie clara, case toda a luz do EMISOR será reflectida, detectándoa o RECEPTOR.
- Se o sensor se atopa sobre unha superficie escura, pouca luz do EMISOR será reflectida, detectándoa o RECEPTOR.
Coma se observa na fotografía do sensor, a casa MakeBlock, nomea os dous sensores para que os podamos programar, sensor1 e sensor2
Estes dous sensores poden estar en distintas situacións, en concreto 4:
| POSIBLILIDADES | SENSOR1 | SENSOR2 | SENSOR1 | SENSOR2 | VALOR SENSOR |
| CASO 1 | NON DETECTA | NON DETECTA | 0 | 0 | 0 |
| CASO 2 | NON DETECTA | SI DETECTA | 0 | 1 | 1 |
| CASO 3 | SI DETECTA | NON DETECTA | 1 | 0 | 2 |
| CASO 4 | SI DETECTA | SI DETECTA | 1 | 1 | 3 |
c
SOFTWARE: O Segueliñas no mBlock"
Coma resumo do apartado anterior, tense:
| VALOR 0 | VALOR 1 | VALOR 2 | VALOR 3 |
|
Non detecta Non prende ningunha luz |
Detecta o sensor2 Prende a luz |
Detecta o sensor1 Prende a luz |
Detecta os dous Prende as dúas luces |


Sábese en que situación está o segueliñas, pola activación de cada un dos detectores, pudendo programalos por separado.
Comandos:
|
Código
|
|
|
- Moi importante é verificar o porto onde está conectado o sensor. - O valor de este comando entregará 4 valores posibles (0, 1, 2, 3) - Colócase noutros comandos de control, operadores, ... |
 |
Coma nos casos anteriores, realizarase unha actividade de programación para coñecer o funcionamento do segueliñas.