Neste capítulo:
- HARDWARE: Sensores de Luminosidade
- SOFTWARE: O Sensor de luminosidade no mBlock
- Actividades:
-
-
- Vesme?
- Corre cara a luz
-
HARDWARE: Sensores de Luminosidade
Estes sensores, tamén chamados Sensores de Luz, detectan a intensidade de luz sobre eles.
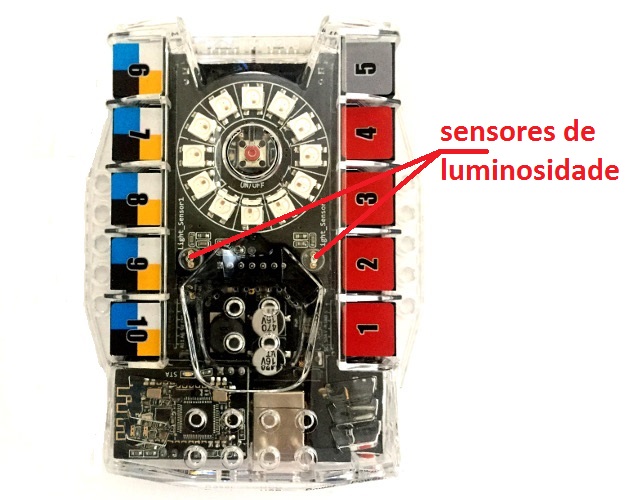
O mBot Ranger ten dous sensores de luminosidade integrados na placa. Atópanse situados no módulo do Anel de Leds en dous dos seus extremos, tal e como están indicados nas fotografías. Se inciden variacións de luz sobre elas, os sensores detectarán o cambio e o valor de esta magnitude.
 |
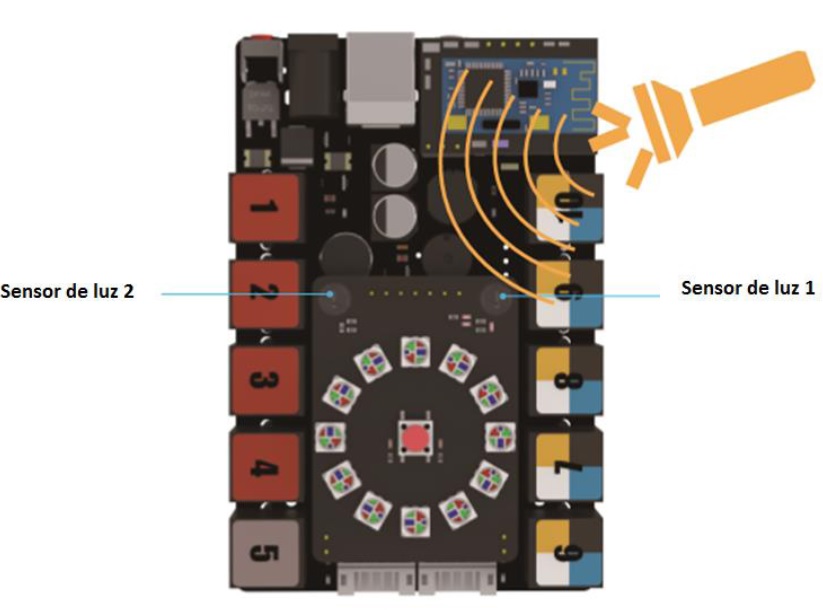 |
Para poder diferencialos ven marcado na placa o nome de cada un dos sensores.
-
-
-
- Light_Sensor1
- Light_Sensor2
-
-
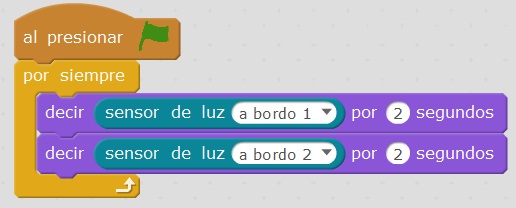
SOFTWARE: O Sensor de luminosidade no mBlock
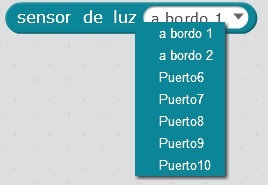
Estes sensores están nomeados para que resulte máis sinxelo programalos, así temos que ter en conta a correspondencia entre os sensores e os comandos. Cando se queira programar o sensordeluz1, marcado na placa como Light_Sensor1 a súa correspondencia no comando de programación é "a bordo1" ou "on board1" é para o sensor 2, Light_Sensor1 será "a bordo2" ou "on board2"
| Light_Sensor1 | on board1 ou a bordo1 |
| Light_Sensor2 | on board2 ou a bordo2 |
Poderemos utilizar estes sensores coma interruptores, é dicir se hai luz realiza unha determinada misión, ou ao contrario, son útiles e fáciles de programar.
Os comandos, son:
|
Código: Permite programar sabendo o valor detectado polo sensor. |
|
Pódese escoller a conexión adecuada para cada sensor:
|
 |
Coma nos casos anteriores realizarase unha actividade para coñecer o rango de valores que detectan estes sensores de luz.





 e/ou
e/ou