Ata o de agora estivemos traballando co robot e os seus actuantes; programamos sons, leds e motores.
Comezamos neste capítulo cos sensores, lembra que un sensor é un dispositivo electrónico que detecta magnitudes como luz, son, obstáculos, temperatura, etc..., imos aprender a programar o robot utilizando os valores das magnitudes físicas que rexistra para realizar as misións encomendadas.
Neste capítulo:
- HARDWARE: Sensor de Ultrasóns
- SOFTWARE: Sensores de ultrasóns no mBlock
- Actividades: Exercicios propostos e resoltos
-
- A canta distancia estou?
- Non Choques!!!
- Ataca!
HARDWARE: Sensor de Ultrasóns
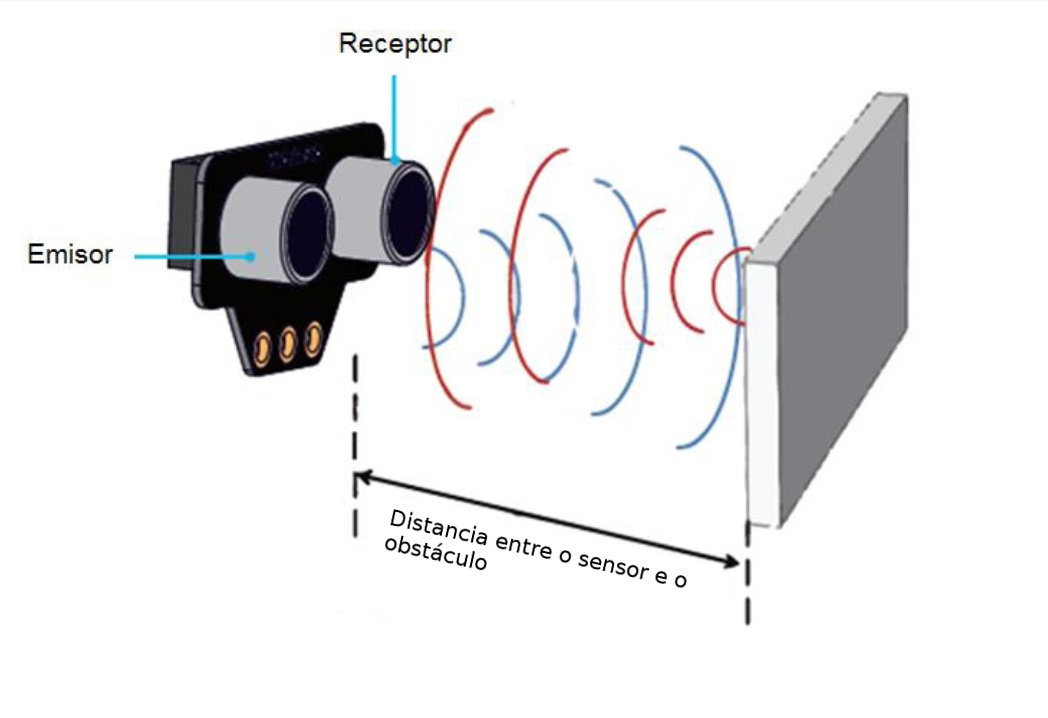
O sensor de ultrasóns é un compoñente electrónico que detecta a presenza de obxectos e indica a que distancia están do robot.
Este sensor funciona moi parecido ao sistema de ecolocalización de un morcego.
Os morcegos localizan as súas presas emitindo uns berros moi agudos, cun ton tan alto que a gran maioría de humanos non somos capaces de escoitar. Estes ultrasóns, cando chocan con algo, rebotan coma o eco nunha montaña, e cando o escoitan os morcegos saben onde está o obxecto.

De xeito similar funciona o sensor de ultrasóns do mBot Ranger. Ten dous elementos , emisor e receptor. O emisor lanza ultrasóns que chocan e son recollidos polo receptor. Sabendo o tempo que tarda en chegar e tendo en conta a velocidade dos ultrasóns, pódese deducir a distancia dos obxectos ao sensor. Podemos dicir que son coma os ollos do robot.
 |
 |
Ten un rango de 3cm- 400cm, isto quere dicir que é capaz de detectar obstáculos que están situados diante, dende os 3cm ata os 400cm.
É un sensor externo, non ven incorporado á placa, polo que se conecta a ela nos portos cos números do 6 ao 10, as conexións de catro cores.
![]()
SOFTWARE: Sensores de ultrasóns no mBlock
Os sensores aportan información, obteñen datos que se van utilizar para programalos para realizar misións.
Este sensor realiza unha función parecida aos nosos ollos cando camiñamos. Os ollos envían información ao cerebro que a procesa e determina que acción ten que realizar os actuantes, as pernas.
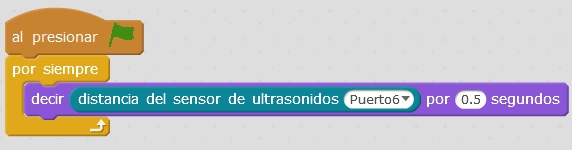
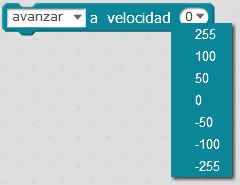
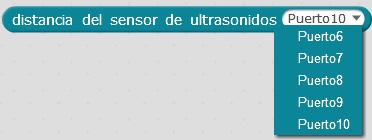
O sensor de ultrasóns está informando en cada momento da distancia a que se atopan os obstáculos. O comando permite escoller o porto onde está conectado o sensor. Se non está ben seleccionado, o programa non funcionará.
|
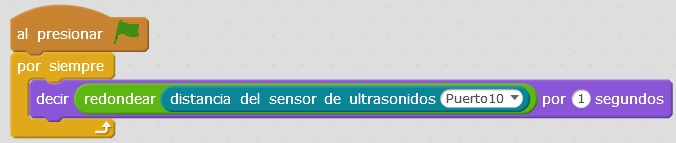
Código:
|
|
|
 |
O comando do sensor vai incrustado nos comandos dos bloques de control e operadores. Un exemplo para entender o explicado: O valor do sensor está dentro de un operador de igualdade e a súa vez pertence a unha estrutura condicional que se atopa nos bloques de control.
O valor do sensor está dentro de un operador de igualdade e a súa vez pertence a unha estrutura condicional que se atopa nos bloques de control.
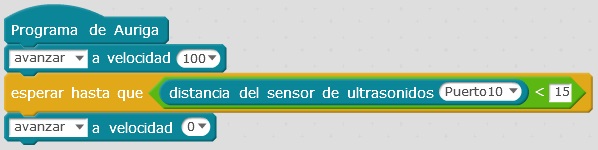
A seguinte Actividade úsase para comprobar o funcionamento do sensor de ultrasón. É moi útil para revisar o bo funcionamento do sensor.