Neste capítulo:
- Hardware: Motores
- Software: Actuantes de movemento para o mBlock
a) Código para os dous motores á vez. Actividade: "Baila"
b) Código para os dous motores por separado.
b.1.) Para M1 ou M2 escollendo a velocidade por separado. Actividade: "Rodéame"
b.2.) Para M1 ou M2 escollendo a velocidade e o número de graos de xiro por separado.
c) Outros comandos. Para poder programar os motores conectados á placa pola conexións RJ25, coma motores paso a paso, servos etc..
HARDWARE: Motores
O Ranger, móvese!!!
O robot Ranger ten como parte dos seus actuantes, dous motores de corrente continua, que a súa vez, moven as rodas nas tres posibles montaxes, tanque, de carreiras e balancín.
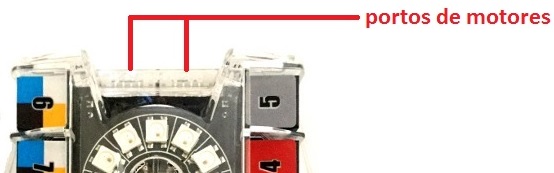
Recordade que a placa ten conexións especificas para os motores. Nas fotografías de abaixo vemos a colocación dos portos e o aspecto dos motores cos seus cables de conexión.
|
Para distinguir os dous motores e as súas conexións, noméanse como M1 e M2.
|
|

- Os motores M1 e M2, móvense por separado. Isto ocasiona distintos movementos que imos analizar a continuación. Os motores de xeito independente poden xirar cara adiante, cara atrás e a distintas velocidades cada un deles.
- As características do xiro dos motores son:
- Os motores M1 e M2, poden xirar cara a diante a unha velocidade entre 0 e 255, onde o 0 é o valor mínimo e 255 é o valor máximo de velocidade. Un exemplo para aclarar os conceptos:
- Se poñemos M1=0 e M2= 0, significa que os motores están parados, están os dous a cero.
- Se poñemos M1=100 e M2=100, motores cara adiante, xa que o valor é positivo e a unha velocidade media; lembrade que o máximo son 255.
- Os motores M1 e M2, poden xirar cara atrás a unha velocidade entre 0 e -255. O sentido de xiro dos motores ven definidos polo signo, se o signo é positivo significa que vai cara adiante e se é negativo, cara atrás. Outro exemplo:
- Se M1=-100 e M2=-100, motores cara atrás (signo negativo) a unha velocidade media
- Se os motores M1 e M2 teñen valores distintos, provocarán movementos con xiros. Se un motor xira cara adiante e o outro cara atrás provocará un xiro, imaxinádevos que ides nunha barca e remades en sentidos contrarios, avanzas pouco, só xiras. Segundo a intensidade na velocidade e o sentido de xiro dos motores conséguense distintos movementos. Por exemplo:
- Se M1=50 e M2= -50, M1 xirará cara a diante e o M2 cara atrás, o que provoca un xiro á esquerda
- Se M1=-50 e M2=50, M1 xira cara atrás e M2 cara diante, o que provoca un xiro á dereita
NOTA: As montaxes do robot Ranger teñen distintas características de movemento causado pola súa configuración.No modo Tanque as rodas engrenan nunha cinta pneumática que lle permite adaptarse aos terreos máis complicados, na configuración de Carreiras o robot é moito máis áxil e rápido.
SOFTWARE: Actuantes de movemento no mBlock
Para o movemento do noso robot existen comandos que controlan os motores, e que iremos analizando pouco a pouco. Existen distintos comandos para o movemento dos motores:
a) Os dous motores á vez: Un único comando move os dous motores ao mesmo tempo, pódese escoller a dirección e sentido así coma a súa velocidade.
b) Os dous motores por separado: Aquí cada motor vai controlado por un comando, pódense programar polo tanto de xeito independente. Analizaranse dous distintos.
a) Os dous motores á vez.: Os motores móvense en un único bloque.
|
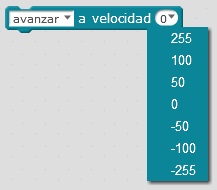
Código Con este código podemos escoller a dirección e sentido do movemento, así coma a súa velocidade. |
|
|
Escolla da Dirección e Sentido:
Cara diante, cara atrás, esquerda e dereita |
 |
|
Escolla da Velocidade : Calquera valor entre 0 e 255 0 motor parado 100 valor medio 255 máxima velocidade
|
 |