COMPOÑENTES
Neste apartado imos coñecer todas as partes do robot.
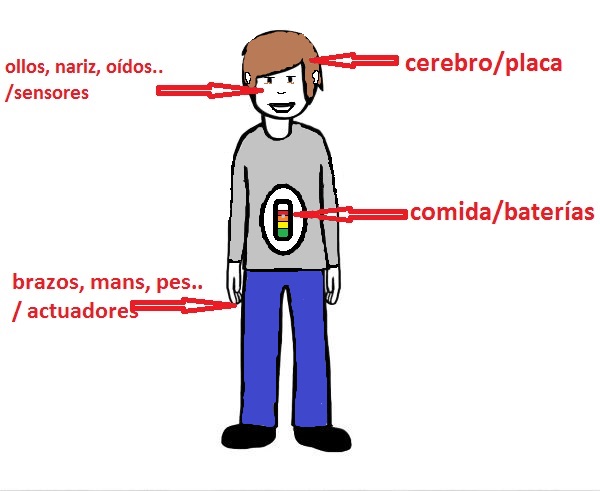
Para comezar realizaremos unha comparanza entre nós e o robot. Se vos fixades , veredes que podemos identificar algunha semellanzas.
- Comida- aparello dixestivo dos humanos comparada coa enerxía-baterías do robot.
- O cerebro comparado coa placa do robot.
- Brazos, mans, pés..do noso corpo comparado cos actuantes dos robots.
- Ollos, nariz, oídos identificados cos sensores dos motores.
 |
 |
As partes:
- Enerxía
- Placa
- Actuantes
- Sensores
- Conexións: Portos
- Comunicación
1. ENERXÍA
Todos os seres vivos necesitamos obter enerxía para vivir e desenvolver as nosas funcións, cando nos falta, sentímosnos sen forza, todo faise máis lento. Aos robots e ao resto dos aparellos pásalles exactamente igual, necesitan enerxía.
Nós utilizamos a comida como fonte de enerxía, e os robots van utilizar, pilas ou baterías recargables. Pódese escoller entre:
| - 6 Pilas ou baterías de 1,5 v | - Batería recargable de litio de 7,4v |
 |
 |
As pilas ou baterías gástanse, son de un só uso, fronte ás baterías recargables que son reutilizables. Aquí radica a súa principal diferencia.
2. PLACA
O noso cerebro é a parte máis importante do noso organismo, almacena información, programas e decide como actuar segundo as nosas percepcións e necesidades. Iso mesmo é o que fai a placa do noso robot. Segundo as percepcións ou valores do que detectan os sensores, manda información aos actuantes para que realicen a función que teñen programada.
O cerebro do robot é unha placa Arduino Mega 2560 con 256 kb de memoria flash. É un cerebro potente para que poidades realizar unha chea de misións.
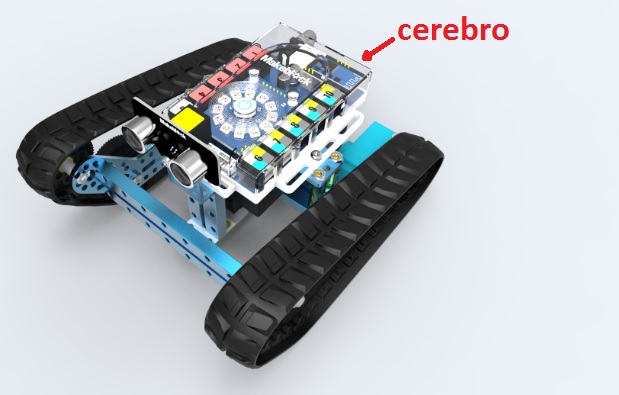
Ademais a placa pódese separar do robot e ser utilizada para realizar outros proxectos.
3. ACTUANTES
En nós, os humanos, os actuantes son as partes do noso corpo que realizan accións. Por exemplo, as pernas cando andan, dan patadas, corren, agáchanse...ou as mans agarrando cousas, aplaudindo, ....Todos os actuantes necesitan un cerebro que lles manda, simplemente reciben ordes e as cumpren.
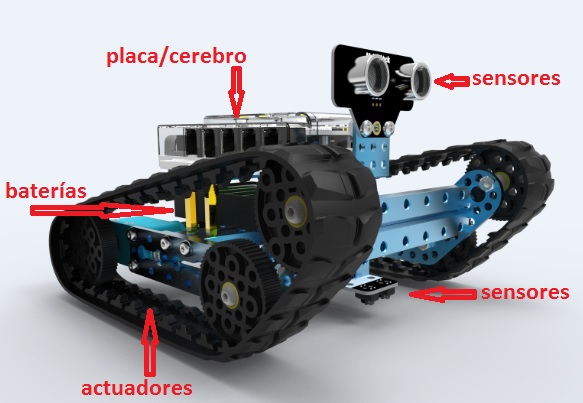
Os actuantes nos robots producen un efecto ou unha acción. Son os que lle permiten ao robot moverse, emitir sons, iluminarse, etc.
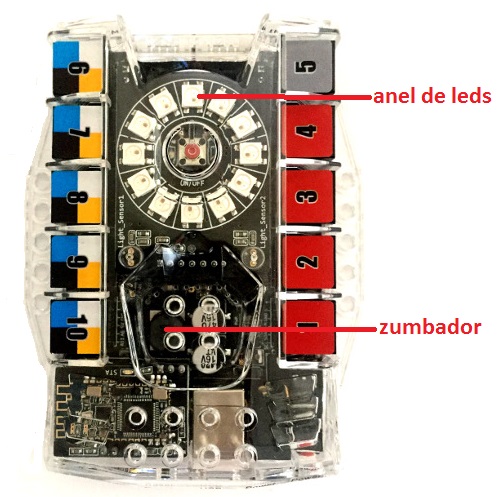
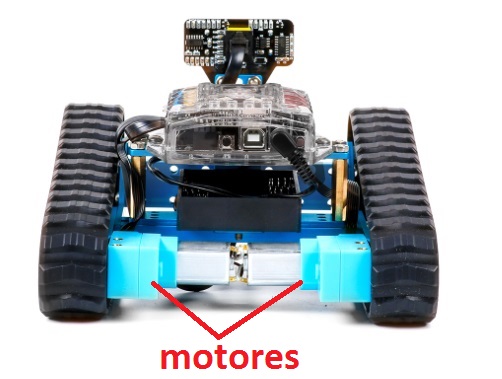
Os actuantes do robot Ranger están na placa e na estrutura que rodea a mesma. Na placa atopamos actuantes como leds e zumbadores e na estrutura do Ranger hai dous motores de corrente continua que moven as rodas, a cinta pneumática ou outros dispositivos que lle poidamos conectar.
| Na placa : | No robot : |
 |
 |
É dicir, ten en total:
12 Leds RGB
1 Zumbador
2 Motores
O robot Ranger ten accesorios a maiores que funcionan como actuantes para facer brazos articulados, garras, patas con motores paso a paso, servos, e máis dispositivos que se conectan co obxectivo de interactuar co mundo.
4. SENSORES
Os humanos temos 5 sentidos famosos, (oído, vista, olfacto, gusto e tacto) e outros sentidos menos coñecidos pero que tamén son sensores como o sentido do equilibrio, o sentido térmico (avisa se fai calor ou frío) ou a sensación de fame tamén é un sensor dos humanos. Os sentidos polo tanto dan información do que sucede ao noso cerebro e este actúa segundo considere ou teña programado.
Polo tanto, os sensores coma os sentidos, recollen información do exterior e a mandan ao noso cerebro para que a procese.
| NOS TEMOS 5 SENTIDOS CLÁSICOS | SENSORES DO RANGER |
 |
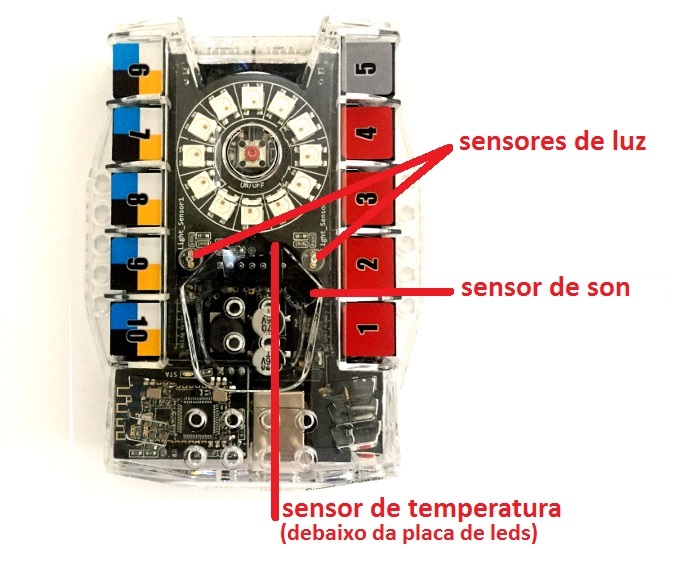
2 sensores de luz 1 sensor de son 1 sensor de temperatura 1 sensor xiroscopio 1 sensor de ultrasóns 1 sensor segueliñas
|
- Os sensores de luz detectan a intensidade de luz que reciben, están situados na placa e como veremos en capítulos posteriores teñen moitas aplicacións.
- O sensor de son, rexistran os valores que existen ao seu redor, tamén está situado dentro da placa.
- O sensor de temperatura detecta a temperatura exterior do robot, este sensor está situado na placa debaixo da placa de leds.
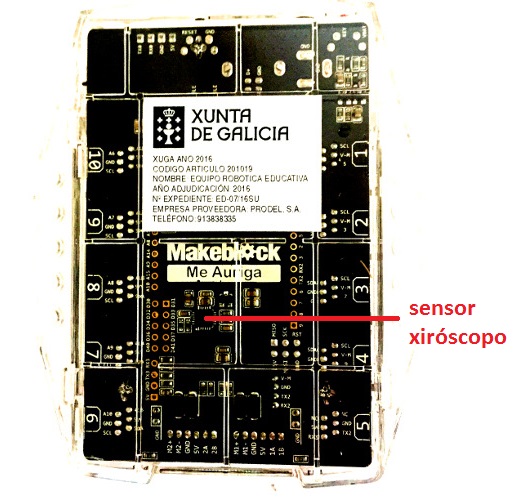
- O sensor xiroscopio sabe en que posición esta colocado, se está xirado ou inclinado.
- O sensor de ultrasóns, detecta se hai algún obstáculo diante.
- O sensor segueliñas é capaz de distinguir se atópase sobre unha liña branca ou sobre unha liña negra (clara ou escura).
Nas seguintes fotografías están as imaxes de todos os sensores que trae o robot Ranger.
 |
|
|
|
 |

5. CONEXIÓNS: PORTOS
O cerebro do robot ten que estar conectado con todos os seus compoñentes, ten que ter unha liña de unión cos sensores para recibir a información e cos actuantes para poder desenvolver as misións.
Sensores e actuantes deben estar conectados á placa, ao cerebro, por elo necesitamos unhas conexións específicas, os portos.
Na placa distinguimos dous tipos de portos:
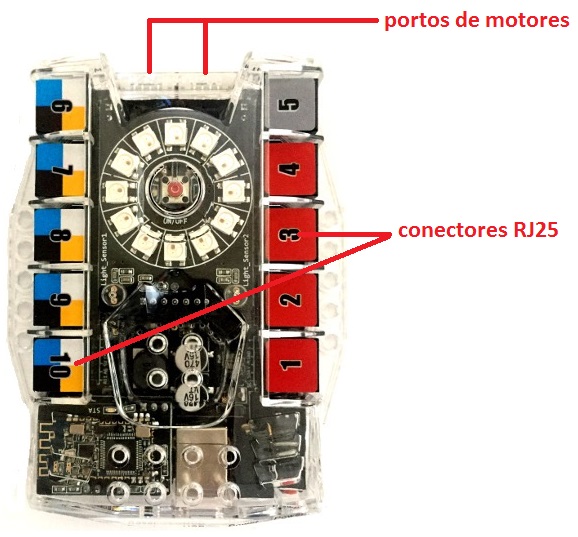
- Portos para os motores M1 e M2 (os motores que moven as rodas)
- Portos RJ25 ou portos de expansión que serven para conectar sensores e actuantes á placa.
Dispón de 10 portos de expansión:
 |
motores de 6-12 voltios (para servos, controlador do motor) |
 |
porto serie do Harware ( para Bluetooth) |
 |
interface dixital, dixital dual, I2C (para sensores, leds, potenciómetros, joystick) |
A disposición destes portos é:
6. COMUNICACIÓN
A razón fundamental dun robot é que realice accións que nós programamos, é dicir:
- decidimos unha tarefa
- convertémola nunha linguaxe entendible para o robot, programámola
- enviámoslla para que despois de procesala ordene aos actuantes
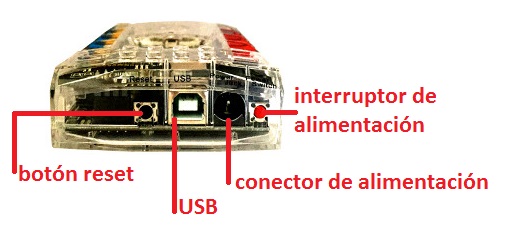
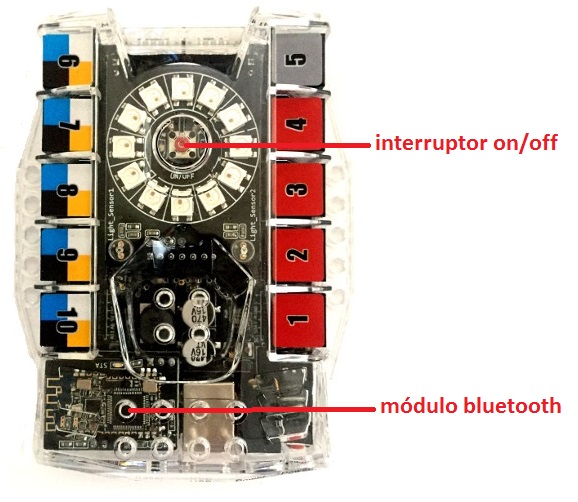
A comunicación realizarase a través dun porto USB para o ordenador ou a través do módulo Bluetooth para ordenadores, móbiles e tablets.
- Outras conexións necesarias para o seu funcionamento son:
- Botón de on/off: Botón de aceso e apagado, para apagado debemos premelo durante uns segundos.
- Conexión de alimentación: É a conexión para a batería recargable ou as baterías non recargables.
- Botón de reset
- Interruptor de Alimentación
|
Nestas fotografías están marcadas as conexións indicadas:
|
 |